


 手机资讯
手机资讯 官方微信
官方微信摘要 柔性打磨机器人装置申请号:201520675957.6申请日:2015.09.02国家/省市:中国上海(31)&nbs
柔性打磨机器人装置
申请号:201520675957.6 申请日:2015.09.02
国家/省市:中国上海(31)
主分类号:B24B 21/16(2006.01)
授权公告号:205111513U
授权公告日:2016.03.30
分类号:B24B 21/16(2006.01); B24B 21/18(2006.01); B24B 41/00(2006.01)
申请人:上海思客琦自动化工程有限公司
发明人:孔令康; 余涛; 孙田军
申请人地址:上海市松江区小昆山镇光华路650号8幢
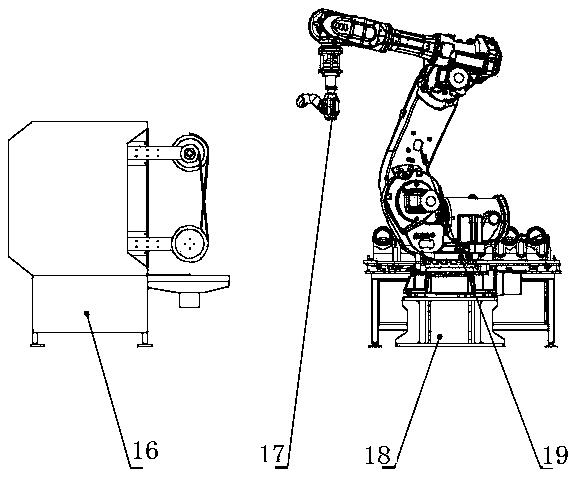
摘要:本实用新型公开一种柔性打磨机器人装置,包括上下料工装、机器人以及砂带机,上下料工装下部设有工作台支撑,上下料工装上部设有两个工作台,工作台外侧边两端设有侧面挡板,工作台上设有行走机构,行走机构上设有工件定位夹具,工件定位夹具上设有定位板,定位板两侧分别设有拉手,定位板上装有若干个工件,上下料工装一侧设有机器人,机器人作用端设有工件夹持装置,工件夹持装置内设有气缸以及电磁阀,机器人一侧设有砂带机,砂带机一侧设有不同大小的两个接触轮,两个接触轮之间绕有砂带,砂带机另一侧同样设有不同大小的两个接触轮。相对现有技术,本实用新型实现对工件不同工序进行自动磨削,节省人力成本,同时提高产品质量的稳定性。
主权利要求:1.一种柔性打磨机器人装置,包括上下料工装、机器人以及砂带机,其特征在于,上下料工装下部设有工作台支撑,上下料工装上部设有两个结构相同的工作台,工作台外侧边两端通过螺栓设有两个侧面挡板,两个工作台上分别设有行走机构,行走机构内设有气动装置和感应开关,行走机构上设有工件定位夹具,工件定位夹具上设有定位板,定位板两侧分别设有拉手,拉手两端贯穿有六角头螺栓,定位板上装有若干个工件,每个工件两侧均分别设有定位块和限位块,工件一端设有轴孔,工件轴孔上连接有定位销,上下料工装一侧设有机器人,机器人设于机器人底座上,机器人作用端设有工件夹持装置,工件夹持装置内设有气缸以及由机器人内部的PLC控制的电磁阀,机器人一侧设有砂带机,砂带机一侧设有不同大小的两个接触轮,两个接触轮纵向放置,且接触轮之间绕有砂带,砂带机另一侧同样设有不同大小的两个接触轮。











 豫公网安备41019702003645号
豫公网安备41019702003645号